
ARDUINO MOTOR SHIELD (L298P)
")
")
ARDUINO MOTOR SHIELD (L298P)
Tuotekuvaus
Kuvaus
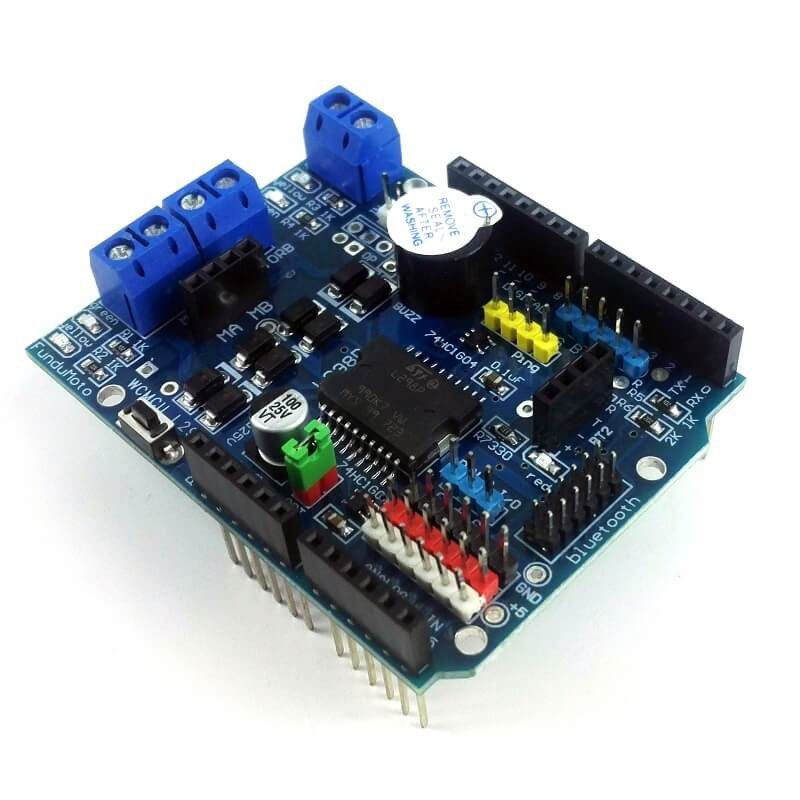
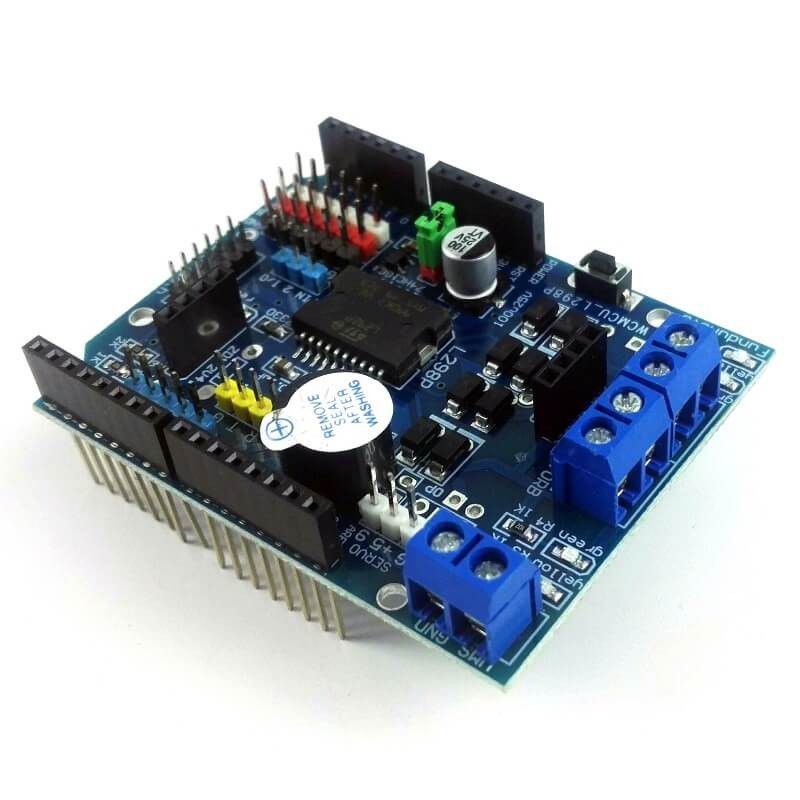
Tämä L298P-moottoriohjainpiirille perustuva moottoriohjainkortti pystyy ohjaamaan kahta harjallista moottoria samanaikaisesti nopeuden, suunnan, käynnistyksen ja pysäytyksen osalta. Kahden täyden H-sillan piirin ansiosta tämä moottoriohjainkortti pystyy ohjaamaan myös bipolaarisia tai unipolaarisia askelmoottoreita.
L298P-ohjainpiirin lisäksi siinä on runsaasti liitinpinnit ja naarasliitin Arduinon GPIO:lle. Arduinon emolevyn ADC-pinnit on laajennettu SVG-liitinpinniksi (Signal Voltage Ground), jotka ovat samanlaisia kuin RC-servoissa. Tämä helpottaa anturimoduulin liittämistä ylimääräisen GND- ja 5V-pinnin avulla.
On syytä muistaa, että Bluetooth-moduuleja on kahta tyyppiä, pääasiassa HC05 tai HC06. Toista Bluetooth-liitintyyppiä käytetään harvoin.
Tämä monipuolinen, L298P-ohjainpiirille perustuva moottorisuojus sopii Arduino Uno -alustalle tai muille Arduino Uno -yhteensopiville alustoille.
Ominaisuudet
- Ohjaa kahta DC-moottoria 4,8–24 V:n jännitteellä, jopa 2 A:n huippuvirralla (1,0 A jatkuva maksimi)
- Sisäänrakennetut Schottky-diodit suojaavat moottorin vastasähkömagneettiselta jännitteeltä
- Ohjaa yhtä servomoottoria erillisellä 5 V:n säädetyllä virralla
- Sisäänrakennettu summeri kytketty D4:ään, aktiivinen korkea
- Ylimääräinen painonappi Arduino-nollauskytkimenä
- Bluetooth-liitin (x2)
- Ultraääninen etäisyysmittari Ping-liitin SR04:lle (Ping ja Echo)
- RGB-LED-liitin
- 6 analogista/digitaalista nastaa (A0–A5) tuotu 3-napaisiin liittimiin (SVG), joissa jokaiselle tulolle on käytettävissä 5 V ja maadoitus (Gnd) anturien helpon kytkennän mahdollistamiseksi
- Pinoitettavat naarasliittimet toisen tyttärikortin tukemiseksi
- Voi valinnaisesti syöttää virtaa liitetylle Arduinolle suojalevyn kautta
[img-24963-left-desc_default]
Logiikan virransyöttöalijärjestelmä
Arduinon 5 V on tuotu suojalevyyn ja se on käytettävissä:
- 6 sarjaa punaisia anturin 5 V -nastoja (SVG) analogiselle nastalle
- Keltainen Ping-liitin ultraääniset etäisyysmittarit varten
- Kaksi sinistä digitaaliliitintä
- Käytetään L298P-sirun logiikkaosan virransyöttöön.
Tämä varmistaa, että niillä on hyvä ja puhdas 5 V:n virta riippumatta siitä, mitä moottorit tekevät.
Arduinon 3,3 V -jännite on tuotu suojakoteloon ja on käytettävissä kahdessa Bluetooth-liittimessä.
Arduinon emolevy voidaan virrata erikseen tavallisella USB- tai DC-virtaliittimellä tai vaihtoehtoisesti myös tästä suojakotelosta. Tämän virtareitin valitsemiseksi elektrolyyttikondensaattorin lähellä on jumpperi, jossa on merkintä ”OPT”. Kun tämä hyppyjohdin on irrotettu, Arduino on kytkettävä erilliseen virtalähteeseen. Kun hyppyjohdin on paikallaan, moottorin VMS-virtaliitännän virta kytketään Arduinon Vin-nastaan, joka syöttää virtaa Arduinon sisäiselle 5 V:n jännitesäätimelle. Tämän vaihtoehdon käyttämiseksi moottorin virtatulon on oltava vähintään 6,5 VDC ja alle 12 VDC, jotta se voi syöttää virtaa säätimelle. Jos Arduino saa virtaa suojalevystä, Arduinon DC-virtaliitintä ei tule käyttää virrankäyttökonfliktien välttämiseksi, mutta USB-liitäntää voidaan käyttää.
Moottorin virransyöttöjärjestelmä
Moottorin virta tulee 2-napaiselle ruuviliittimelle. VMS on moottorin positiivinen jännite, joka voi vaihdella välillä 4,8–24 VDC. Jos käytät tätä tuloa Arduinon virransyöttöön asentamalla ”OPT”-hyppyjohdon, tämän liittimen suurin tulojännite tulisi rajoittaa 12 V:iin, jotta Arduinon säätimen ylikuumeneminen vältetään.
- VMS = Moottorin Vcc, jonka on oltava välillä 4,8–24 VDC
- GND = Moottorin maadoitus
Tämä moottorin virta syötetään 5 V:n säätimeen, joka on asennettu suojalevyn pohjaan. Tämä 5 V:n jännite syöttää valkoista servoliitintä (lähellä summeria). Tämä estää servon sähköistä kohinaa pääsemästä takaisin päävirtalähteeseen, joka syöttää logiikkaa. Jotta tämä 5 V:n säätöpiiri toimisi, VMS-jännitteen on oltava vähintään 6,3 V ja rajoitettava enintään 12 VDC:hen, jotta 5 V:n säätöpiiri ei ylikuumene.
Huomautus: Jos OPT-hyppyjohdin on paikallaan ja USB on kytketty, mutta VMS-moottoriliittimessä ei ole virtaa, laite yrittää käyttää USB-virtaa DC-moottoreiden virransyöttöön. Tätä tulisi välttää.
Jos OPT-hyppyjohdin on paikallaan ja virta tulee Arduinon DC-liittimeen, se toimii, mutta DC-moottorin melu kytkeytyy 5 V:n logiikan virtalähteeseen ja voi aiheuttaa häiriöitä, joten sitä ei oikeastaan suositella. Yleisesti ottaen, jos käytät moottoreita, sinun tulisi suunnitella moottorin virran tuominen VMS-virtaliittimeen, jotta toiminta olisi mahdollisimman vakaata.
DC-moottoreiden ohjaus
L298P sisältää kaksi täyttä H-silta-ohjauskanavaa, jotka tarjoavat täyden nopeuden ja suunnan hallinnan. Kaksi DC-moottorin ohjauskanavaa voivat toimia jännitteillä 4,8–24 V ja virroilla, jotka ovat enintään 2,0 A (huippu) ja 1,0 A jatkuvasti kanavaa kohti.
Voit myös jakaa yhden moottorin ohjauskanavan kahden moottorin kesken, kunhan yhdistetty virta pysyy 2 A:n rajoissa ja et välitä siitä, että moottorit pyörivät samaan suuntaan ja samalla nopeudella. Tämä on tyypillistä esimerkiksi nelivetoisessa robottiajoneuvossa, jossa kummankin puolen kaksi pyörää toimivat samalla nopeudella ja samaan suuntaan.
L298P-moottoriohjain käyttää Arduinon nastoja D10, D11, D12 ja D13 moottorin ohjaukseen. Nastat 10 ja 11 ovat PWM-nastoja, jotka kytketään sirun EN-nastoihin nopeuden säätämiseksi moduloimalla aktivointituloa. D10 ohjaa moottorin A nopeutta ja D11 moottorin B nopeutta.
Nastat 12 ja 13 on kytketty IN-tuloihin suunnan ohjausta varten. Nasta 12 ohjaa moottorin A suuntaa ja nasta 13 ohjaa moottorin B suuntaa. Yleensä kunkin moottorin pyörimissuunnan määrittämiseen käytetään kahta nastaa, mutta tässä suojauksessa on invertteri, joka toimittaa signaalin käänteisen version näille kahdelle nastalle. Tämä vähentää Arduinossa käytettävien nastojen määrää, mutta poistaa mahdollisuuden dynaamiseen jarrutukseen, mikä ei yleensä ole ongelma useimmissa projekteissa. Nopeudenohjausnastojen arvon laskeminen nollaan PWM-arvona pysäyttää laitteet.
DC-moottorin liitännät
Moottorit liitetään 4-napaisen ruuviliittimen kautta, jossa on 2 liitintä kullekin moottorille, jotka on merkitty MOTORA ja MOTORB.
Kunkin moottorin +/- -nastat eivät ole merkittyjä, joten niiden kytkentä on jonkin verran mielivaltaista ja riippuu siitä, mitä pidät moottorin eteenpäin- ja taaksepäinajona. Periaatteessa, jos moottori pyörii odotettua vastakkaiseen suuntaan, käännä kyseisen moottorin johdotus yksinkertaisesti päinvastaiseksi.
Nämä moottorin liitäntäpisteet on myös peilattu 4-napaisessa naarasliittimessä, mikä lisää joustavuutta hieman.
Näihin moottorin ohjausjohtoihin on myös kiinnitetty keltaisia ja vihreitä LED-valoja. Niiden kirkkaus vaihtelee PWM-signaalin voimakkuuden mukaan.
Servomoottorin liitännät
Servomoottorit ovat 3-johtimisia laitteita. Ne tarvitsevat 5 V:n jännitteen, maadoituksen ja PWM-signaalin asennon asettamiseksi. Shield käyttää D9:ää PWM-signaalille. Yksi näiden moduulien mukava ominaisuus on, että niissä on oma 5 V:n jännitesäädin servon virransyöttöön, jotta sähköinen kohina ei pääse takaisin pääasialliseen 5 V:n logiikkavirtalähteeseen.
Servoja käytetään tyypillisesti pienen ohjauspyörän kääntämiseen tai anturin, kuten esteiden välttämiseen tarkoitetun ultraäänietäisyysanturin, pyöritykseen.
Servon käyttämiseksi päämoottorin virtaliittimessä on oltava vähintään 6,5 VDC, jotta säätöpiiri toimii.
Jos et käytä servoa, D9 ja tämä erillinen 5 V:n jännite ovat käytettävissä muihin tarkoituksiin.
Arduino- ja Shield-liitinten yhteydet
Kaikki I/O-liitännät on tuotu Shieldin pinottaviin naarasliittimiin lukuun ottamatta IOREF-liitintä ja kahta I2C-liitintä USB-liittimen lähellä, jotta se voi tukea tytär-Shieldiä, kunhan se ei ole ristiriidassa käytössä olevien liittimien kanssa. Lisäksi monet näistä liittimistä on jaettu muihin liittimiin helpottamaan kytkentää.
Shield käyttää seuraavia nastoja, jotka ovat käytettävissä, jos et käytä kyseistä toimintoa:
- Ultraäänianturin ping-ohjaus = D7, D8
- Servomoottorin ohjaus = D9
- DC-moottorin ohjaus = D10, D11, D12, D13
- Summeri = D4
Bluetooth
Levyllä on kaksi Bluetooth-liitintä. Ensimmäinen liitin on 4-napainen liitin, josta tulee 3,3 V:n virta, maa, TX ja RX. Tämäntyyppinen liitin on yhteensopiva HC05- tai HC06-Bluetooth-moduulien ja mahdollisesti joidenkin muiden kanssa. Vastaanottonastassa on 1K/2K-jännitteenjakaja, joka muuttaa Arduinon TX-ulostulon 3,3 V:n yhteensopivaksi, mikä on kätevä ominaisuus.
1 x 4 Bluetooth ‘BT2’ naarasliitin (musta)
- ‘+‘ = 3,3 V
- ‘–‘ = maa
- T = D0 (RX)
- R = D1 (TX)
Toinen Bluetooth-liitin on 12-napainen urosliitin. TX, RX, 5V ja maa on kytketty tähän liittimeen. Ainoat 12-napaiset Bluetooth-liittimet liittyvät yleensä autoihin, joten tällä liittimellä ei näytä olevan paljon käyttöä. Nastojen väli on myös 2 mm eikä standardin mukainen 2,54 mm
Ultraääninen etäisyysanturi
Yleinen robottiliitäntä on ultraääniset etäisyysanturit, kuten HC-SR04. Nämä toimivat lähettämällä ultraäänipingin ja mittaamalla, kuinka kauan pingin paluu kestää. Kortissa on erillinen 4-napainen liitin anturin kytkemistä varten.
1 x 4-napainen urosliitin (keltainen)
- + = 5V
- R = Return (D8)
- T = Trigger (D7)
- G = Ground
Analogiset / digitaaliset anturit
Yleinen ongelma antureita Arduinoon liitettäessä on, että monet vaativat maadoitus-/VCC-liitännät sekä analogisen tulon tai digitaalisen I/O:n. Tämä kortti tuo A0–A5-nastat esiin liitinriville, joka tarjoaa myös erilliset virta- ja maadoituspisteet jokaiselle A0–A5-nastalle, SVG-muodossa. Valkoiset liittimet ovat signaalilinjoja, punaiset liittimet tarjoavat 5 V:n jännitteen ja mustat liittimet maadoituksen.
A0–A5-nastoja voidaan käyttää joko analogisina tuloina tai digitaalisina I/O-liitäntöinä, joten molempia anturityyppejä voidaan tukea.
3 x 6 -liitin (valkoinen/punainen/musta)
- A0 / 5V / Maadoitus
- A1 / 5V / Maadoitus
- A2 / 5V / Maadoitus
- A3 / 5V / Maadoitus
- A4 / 5V / Maadoitus
- A5 / 5V / Maadoitus
Lisäksi on 3-napainen sininen liitin, josta tulee 5 V, maa ja D2, jota voidaan käyttää digitaaliseen anturiin tai muuhun etäliitäntään
1 x 3-napainen liitin (sininen)
- G = Maadoitus
- ‘+’ = 5V
- S = D2 – digitaalinen I/O
RGB-LED
Ja varmuuden vuoksi on 5-napainen liitin, joka tuo esiin D3:n, D5:n, D6:n, 5V:n ja maadoituksen. Tämä sijoittaa 3 PWM-lähtöä sekä virran ja maadoituksen yhdelle liittimelle, mikä voi olla kätevää monissa tilanteissa, kuten RGB-LEDin ohjaamisessa. Tuetaan sekä yhteiskatodi- että anodityyppejä
1 x 5-napainen liitin (sininen)
- ‘ ‘ = 5V – Tämä nasta ei ole merkitty, mutta se sijaitsee D7:n vieressä
- B = D6 – B:tä voidaan käyttää RGB-LEDin sinisenä
- G = D5 – G:tä voidaan käyttää RGB-LEDin vihreänä
- ‘-‘ = maa
- R = D3 – R:tä voidaan käyttää RGB-LEDin punaisena
Summeri
Summeri on kytketty D4:ään. Se on aktiivinen HIGH-tilassa
Nollauskytkin
Suojuksessa on ylimääräinen nollauspainike, joka on helposti käytettävissä.
Pakkausluettelo
- 1 x Shield L298P -moottoriohjain GPIO:lla
Linkit
Tuotetiedot
- Saatavuus Varastossa
- Valmistaja Noname
- Tuotepolku Etusivu komponentitsähkömekaaniset-komponentitMoottoritMoottoriohjaimet ARDUINO MOTOR SHIELD (L298P)
- SKU ARD-L298PBUZZ
- Ominaisuudet
- Yhteensopiva Arduino Uno